|
|

|

|
| e-Pub |
Section: New Results
Highlights of the Year
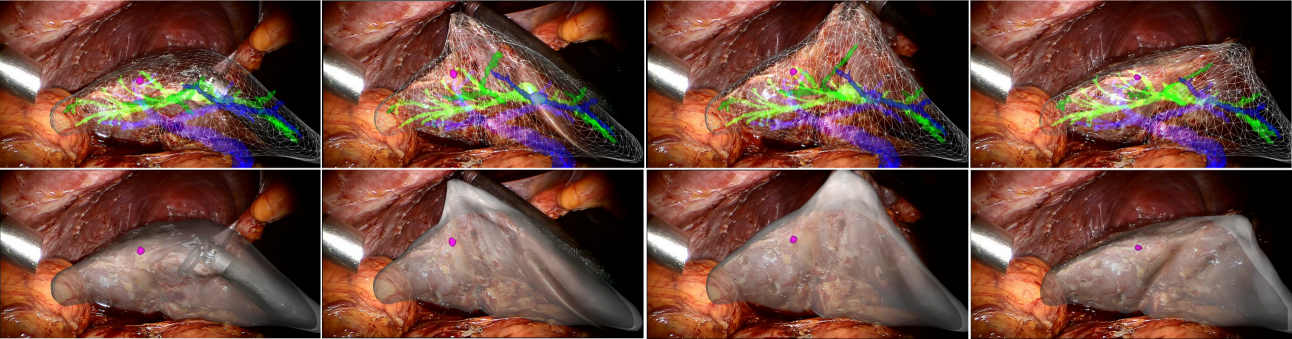
Intra-operative guidance
Each year in Europe 50,000 new liver cancer cases are diagnosed for which hepatic surgery combined to chemotherapy is the most common treatment. In particular the number of laparoscopic liver surgeries has increased significantly over the past years. Minimally invasive procedures are challenging for the surgeons due to the limited field of view.
Providing new solutions to assist surgeons during the procedure is of primary interest. This year, the team developed an innovative system for augmented reality in the scope of minimally invasive hepatic surgery. The first issue is to align preoperative data with the intra-operative images. We first proposed a semi-automatic approach [28] for solving the ill-posed problem of initial alignment for augmented reality systems during liver surgery. Our registration method relies on anatomical landmarks extracted from both the laparoscopic images and a three-dimensional model, using an image-based soft-tissue reconstruction technique and an atlas-based approach, respectively.
Second, we introduced a method for tracking the internal structures of the liver during robot-assisted procedures [25] . Vascular network, tumors and cut planes, computed from pre-operative data, can be overlaid onto the laparoscopic view for image-guidance, even in the case of large motion or deformation of the organ. This is made possible by relying on a fast yet accurate 3D biomechanical model of the liver combined with a robust visual tracking approach designed to properly constrain the model. Our augmented reality proved to be accurate and extremely promising on in-vivo sequences of a human liver during robotic surgery.
Ph.D. defenses
The year 2014 was also special since many PhDs have been defended. Four PhD defenses took place with:
-
Ahmed Yureidini's defense about Robust blood vessel surface reconstruction for interactive simulations from patient data [15] in May 2014,
-
Guillaume Kazmitcheff's defense about Minimal invasive robotics dedicated to otological surgery [13] in June 2014,
-
Hugo Talbot's defense about Interactive patient-specific simulation of cardiac electrophysiology [14] in July 2014,
-
Alexandre Bilger's defense about Patient-specific biomechanical simulation for deep brain stimulation [12] in December 2014.
Organization of ISBMS 2014
The team co-organized the 6th International Symposium on Biomedical Simulation (ISBMS) 2014, which was held in Strasbourg (France) on October 16 – 17, 2014. The ISBMS conference is a well-established scientific meeting that provides an international forum for researchers interested in using biomedical simulation technology for the improvement of patient care and patient safety. The SiMMS group from Imperial College London and IHU-Strasbourg were the two other co-organizers. The event was hosted at IRCAD, a center of excellence in surgical training. The ISBMS chairs were:
The whole team was involved in the organization of the event. About 65 participants joined the conference. Regarding their feedback, the conference was a real success. For more information about ISBMS, refer to the official website http://www.isbms.org .
Finally, a day dedicated to our software SOFA ("SOFA Day") was organized the day after the ISBMS conference. This was the opportunity to introduce SOFA to the ISBMS community and to share with the SOFA users.
|


Demonstration at the French National Assembly
On Tuesday 21st January 2014, the team SHACRA presented its work during the "Internet et société numérique" working group. This was a joint event between Inria and the French National Assembly (Assemblée Nationale). On this special occasion, we made a demonstration of our simulations and the CEO from Inria Michel Cosnard also presented more globally the role of Inria in healthcare but also education, cloud computing, big data.